

マイガレージ掲示板
【ご注意】投稿内容は、掲示板管理者が内容の確認の後、掲載いたします。
本誌の内容に関するご指摘、ご質問は、お問い合わせフォームからお願いいたします。
|
|
外部電源について(全般)
|
投稿日時:2015-10-16 00:12:50 |
||
| 相模75 | ||||
久しぶりに投稿します。
ロボゼロ用のACアダプターが必要になり、さがしましたが製造中止とかで・・
軽量小型であること、発熱が少ない、使い勝手が良いを条件に部品選択をして自作することにしました
。ロボゼロ、ロビーに接続して動作確認したが異常ありませんでした。
ただし、出力波形とか電池との違いの精査が必要かな?。
部品名
1、スイッチング電源(オンボード型)TDKラムダ
VS30B-5(5V-6A) (50×132×23)
2、DC-DCコンバータ昇圧型35V出力
DCCSU3-35V (40×70×12)
・入力電圧範囲:3~35VDC
・入力最大電流:9A
・出力電圧:3.5V~35VDC
・出力電流:6A
3、小型2線式LEDデジタル電圧計
(パネルメータ)3桁表示
4、ケーブル類
5、アルミ板類 素人工作(趣味の範囲)
6、ビス類、絶縁アクリル類
概算5900 寸法 145×55×44 重量272g


相模75さん 初めまして。
参考になる記事を投稿下さり、ありがとうございます。
●ロボゼロ用のACアダプターは、たとえ入手できたとしても、残念ながら、使い物にはなりません。
確かに、両ロボットで使用されているサーボの仕様が似ているため、転用は容易に考えられます。
ただ、ロボゼロは外部電源駆動を最初から想定して設計しており、堅牢で密着面積の広いコネクタを使用しています。このためコネクタ部での接触抵抗は測定不能なほど低く、数Aの駆動電流でも、さほど電圧ドロップは起こしません。
一方ロビの場合には、お尻に付いているコネクタ部は、通常家電用のDCプラグ形状であり、接触抵抗が約0.2Ωと高く、実使用状態で数100mVの電圧降下が見られます。だから、ロボゼロ用ACアダプタを転用しても、電池切れを頻繁に訴えるようです。まあ、外観的にケーブルむき出しでなくスリムなロボットには、接触抵抗を下げるずんぐりとしたコネクタは無粋かもしれませんね。
このことから、ロボゼロ用のACアダプタの電圧がロビ転用には低いため、当方も、やはり自前でACアダプタを用意するのが得策だと思います。
●因みにロボゼロの場合には、外部電源で駆動する場合、コネクタをつなぎかえることが必要です。このことで、誤ってLiイオンバッテリーと直結されないように、安全面も工夫されています。このことからも、ロボゼロは、設計の当初から外部電源駆動を想定したものであると当方は確信しています。
それに対してロビの場合は、既存のコネクタで安易に外部電源駆動すると、バッテリーにとっても、ロボットにとっても非常に危険な状態になります。だからこの類の改造は、電気的な知識を持ったユーザーでないと、一歩間違えれば、ロボットをオシャカにする可能性をはらんでいます。
おそらくロビの場合は、今後もデアゴからACアダプタによる外部電源装置は案内されないと思います(今までロボットに触ったこともない大勢の無知なユーザが、安易に使用してロボットを壊すと、そのクレーム処理だけでデアゴがパンクしてしまいます)。きっと、内蔵のLiイオンバッテリーの充電用に低電流駆動すること前提と割り切ってコネクタ設計したのかもしれません。
●当方も、ロボゼロ用、ロビ用と外部電源用ACアダプタを独自に開発、試作してきました。
・どちらもスイッチング電源なのですが、ロボゼロの場合には、出力波形の電圧変動(リップル)は注意が必要ですね。
この電圧幅が大きいと、ロボット起動状態で、スピーカーから「ブーン」という雑音が発生します。
設計時に、如何にこのリップルを抑制するかに関しては、重要なポイントでした。
回路最終段にノイズフィルターを付けることで、なんとか±40mV程度まで抑え込めました。
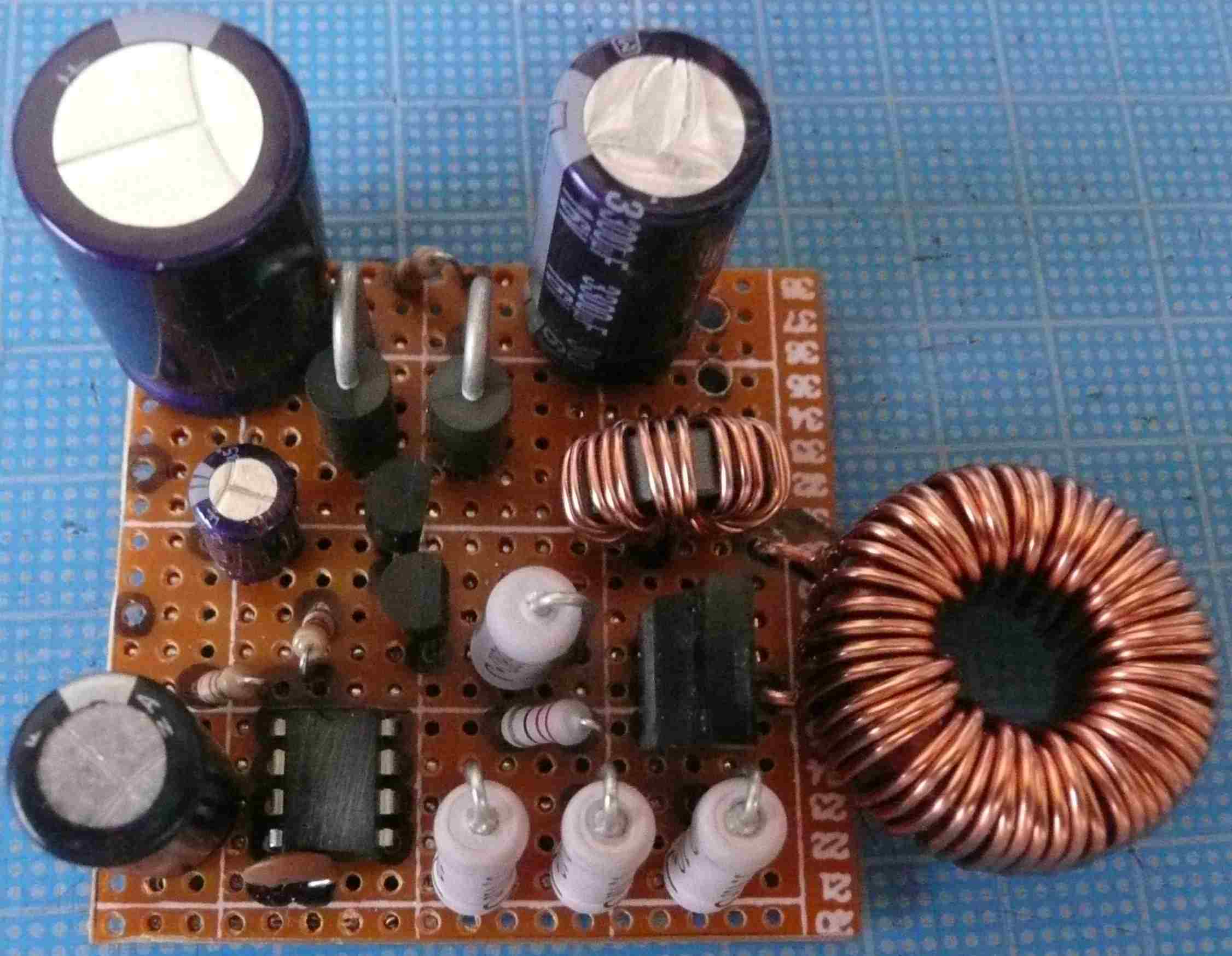
・当方で設計した、ロビのACアダプタ基板(DC-DCコンバータ降圧型)の試作品の画像を添付します。この基板は、使わなくなったノートパソコンのACアダプタの出力(約16V~20V)に接続して使用します。
なお、コイルはエナメル線をトロイダルコアに手巻きして所定インダクタンスに合わせた手作り品で、7.4Vで5Aの駆動能力があります。かかった費用は2000円以下。
回路は前述したロボゼロ用の設計がベースですが、コネクタ部での電圧ドロップを考慮して、出力電圧を高目(無負荷で、フル充電のLiイオン電池と同じ約8V)に設定してあります。
また、電源出力線の配線長を約1mと短くすることで、極力電圧ドロップを抑える工夫も凝らしています。ロボゼロと比べて、そんなに走り回ったり、激しい運動をしないロボットなので、十分に実使用できています。
ロビでは、「充電して欲しい」の頻発を抑えるのが勘所だと思っています。
一口に外部電源用ACアダプタといっても、ロボットによって留意すべきポイントが異なるため、個別の設計が必要と思います。
●貴殿の作品を見させてもらいました。
構成は、電源VS30B-5の出力を、昇圧コンバータDCCSU3-35Vで昇圧してロビの電圧を発生していると拝察します。VS30B-5基板自体がAC100Vに直結出来て、全部品を一体化できるので、非常にコンパクトですね。
(当方の案では、ノートパソコンのACアダプタと自作スイッチング電源の2体に分かれてしまうのが、ちょっと残念)
貴殿の案を見ていると、当方も是非一体化したいとの思いを強くします。
また、ロビはロボゼロと違い、サーボモーターへのケーブルが内蔵され、非常にスマートな外観となっています。
市販のDC電源を見ても、数Aクラスの出力となると、放熱孔の付いた金属の筺体とか、産業用とか、無粋な外観のものしか見当たらないのが悩みです。
とはいえ、ACアダプタも、ロビにそぐわしい、極力スマートな外観を追求したいと思っています。
今回は、参考になる投稿、ありがとうございます。
akkunnさん 初めまして。 貴重なご助言ありがとうございました。
この電源ユニットを作る際、“ロビ君に市販電源アダプターを使用して長時間稼働した紹介”の投稿内容を参考にしました。
ロボゼロ用の外部電源の必要に迫られて、作成したのが本筋で、電源ユニットの調整方法はロボゼロの電池の代わりに外部電源からケーブル、コネクター類を介してロボゼロコントロール部に供給し、電池電圧の7.4Vに概略等しくなるよう、DC-DCコンバータの電圧可変抵抗にて調整、当然ロボゼロはモーション動作状態にしコネクター部での電圧測定をする。その結果、ユニット出力電圧が約7.88Vでした。(動作中の測定だから誤差含みますが、コネクター、2芯ケーブル(0.5スケア)1.8m、DCプラグ&ジャックで電流値を3.5Aとして計算、約0.2Ω以下になります。)
ロビ君の場合は、おまけの使い方です。ロビ君のお尻のDCジャックにDCプラグ、2芯ケーブル(0.5スケア)1.8m、DCプラグ&DCジャックと接続されます。電池は取り外し電池用のジャック部分(3個のコネクター装着された基板)で電圧測定、手を動かす程度モーションしかできないが、DC7.8VからDC7.4Vは保持しているようでした。
尚、電源ユニットのデジタル表示はスイッチング電源の出力電圧(約5.6V)とDC-DCコンバータの出力電圧(約7.88V)を表示しています。
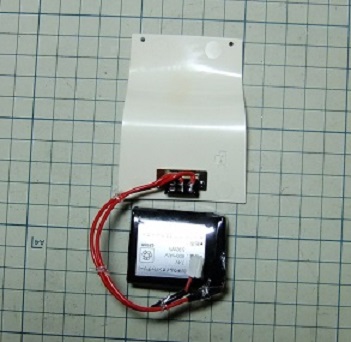
また ロビ君に電池のON OFF スイッチをつけました、ONのときは通常動作、OFFのときは電源ユニットでの動作になります。写真参照
全て改良は自己責任でおねがいします。
akkunnさん
>ロビにそぐわしい、極力スマートな外観を追求したいと思っています。
期待しています。

相模75さん こんばんは
私はロボゼロのことは全く分かりませんが、昨年ロビが完成してから外部電源を作り1年以上経ちますが故障もなく動いています。
内臓電池との並列となる充電用のお尻からの接続や安定化回路のないACアダプタを使うことも故障の原因として作りはじめました。
ロビ君の外部電源 パート3 (2,000円でできる)
http://h7nana.cocolog-nifty.com/blog/2014/09/post-4cc3.html
h7nanaさん こんにちは 相模75です。
>昨年ロビが完成してから外部電源を作り1年以上経ちますが故障もなく動いています。
2000円でできて、故障もなく動作中とかよかったねぇ
私もこの電源ユニットがあることはインターネットで知っていました。購入しようかなと調べて見たら評判がいいのか品切れになっていたので諦めました。
それでこの電源ユニットを作り始めました。軽量小型であること、温度上昇が少ない、使い勝手が良い。を条件にそれと手持ちのロボット(ロボザック、ロボゼロ、ロビ、KHR-3HV)に対応し、4A以上の電流値と、6V~10.5V以上の電圧可変できるを目標にしました。
手持ちのロボット、全て動作確認しました。OKでした。

