

マイガレージ掲示板
【ご注意】投稿内容は、掲示板管理者が内容の確認の後、掲載いたします。
本誌の内容に関するご指摘、ご質問は、お問い合わせフォームからお願いいたします。
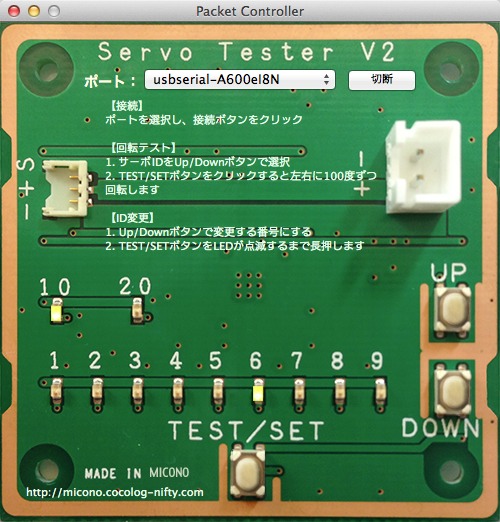
ロビのServoTesterですが、それと同様のことが
できるようなソフトウエアを作ってみました。
用意しなければいけないケーブル類があるのですが、
一度、揃えてしまえば、ServoTester基板を使うのと
同じように、このソフトで、
サーボのテストと、IDの変更ができます(^^)
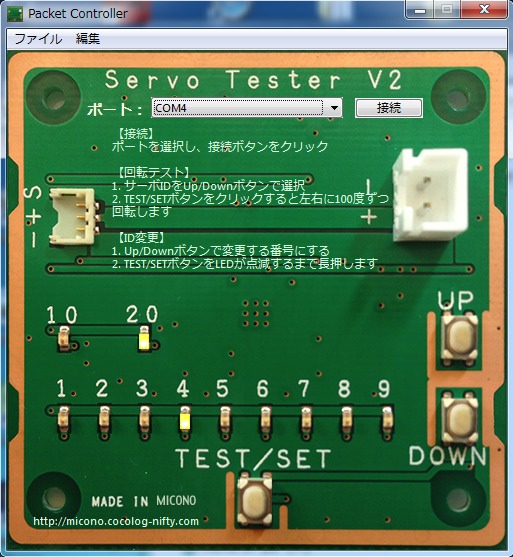
※基板の場合はIDは検出されますが、このソフトでは検出できるようになっていません。
ので、変更したIDに手動で合わせてから、TESTボタンをクリックする必要があります。
ソフトだけではIDが何番検出できなくて、半2重の回路を介す必要があります。
そこまで手をかけるとなると基板を使えばいいじゃんと思うので現時点では
対応させていませんが、また、いつかの機会に対応させるかもしれません。
ご興味があれば、URLのリンク先をみて下さい(^^)
【トピックス】 その他
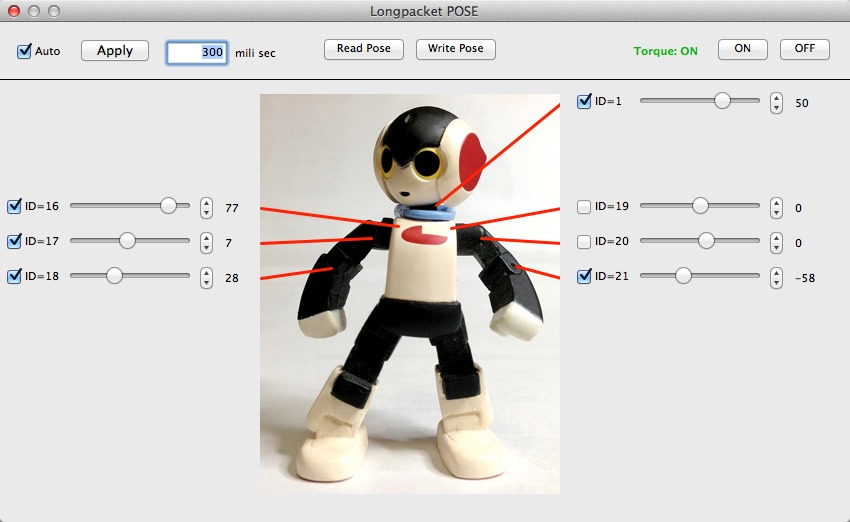
ServoTester for Robi v1.2 を公開しました。
●ロビのIDと位置がわかるサーボに関して、図の様なインターフェイスでスライダーを動かして個々のサーボを動かせるようにしました。
●ポーズを組み合わせて、モーションを作って動かしてみることもできます。
●半2重回路を組み込めばポーズの読み込みもできます。
miconoさん こんにちは はじめまして!
素晴らしい「ServoTester for Robi v1.2」というソフトを公開していただき、本当にありがとうございます。
おかげさまで、ROBI君のディジーチェーン接続での動作チェックが簡単に行えました。
また、組み合わせたポーズでモーションを作ってROBI君を動かしてみましたが、各サーボを動かすスライダーが直感的で使いやすく、いろいろ楽まさせていただきました。
なお、「半2重回路」は未だ手付かずですが、いずれトライしてみようか・・・と思っています。
今後とも、宜しくお願いします。

ふみのへやさん
miconoです。
「ServoTester for Robi」利用して頂きありがとうございました。
いろいろ動かせると楽しいですよね(^^)
ちゃんとつながっているかの動作チェックにもなりますしね。
ページの方、リンクが変になってた部分の修正と、半二重回路のこと書いたページへのリンクも付けておきましたので、是非、半2重回路にも挑戦して下さい!
ポーズを教示できるとモーション作りもかなり楽になりますよ(^^)
miconoさん
情報公開ありがとうございます。
連結したサーボのテストができないので、どーしたものかと思っていました。
ちょっとハードル高そうですが、完成までに時間もあるので色々試してみようと思います。
あせらず少しづつはじめてみます。
今後ともよろしくお願いします。
Dark_sideさん
お返事遅くなりました。
最低限コネクターは自作する必要がありますが、
そこさえクリアすれば、そんなに難しくないかと思います。
完成まで長いですが、こういったことやってると
意外とあっという間に完成時期がきますよ(^^)
miconoさん
はじめまして。
ついに、やっと、腕を動かすことができ、感動して写真を投稿させていただきました。
6月に、miconoさんのサイトを参考にしてサーボのコネクタを購入してから1ヵ月半。
生まれて初めて半田付けに挑戦。
8枚のピッチ変換基板、6個のコネクタをダメにし、ようやく完成しました。
腕が動いたときは涙が出そうでした。
次は両腕に挑戦したいと思っています。
miconoさんのサイト、いつも見させていただいています。
(密かに師匠と呼ばせていただいています)
これからも、よろしくお願いいたします。

KMXさん
師匠です!なんて(笑)
生まれて初めてのハンダ付けで挑戦されたんですね。
初めてだと、あの細かい作業は難しいと思います。
凄いですね。
ほんと動くと嬉しいですよね!
是非、モーション作って、踊らせてみて下さい!
今度、機会があったら、ロビサーボ用コネクタの
ハンダ付けのビデオでも撮ってみるかなぁ。。
miconoさん はじめまして
下半身の組み立てが当分かかりそうなので、このお盆休みで挑戦してみました
(前々から色々取り寄せていたのですが、なんとなく先延ばしにしてました)
運良くコネクタの半田が上手くいき、無事動作チェックができました!
……いえ、不動作のチェックができました!(^^;
見事に両腕とも肩部分の接続がミスっていたという、ていたらく
肩部分なのでバラすのも楽でしたが、ゾッとしました
今後も動作チェックに、ダンスに?、使わせていただきます
ありがとうございました
tom_katさん
コネクター上手く作れて良かったです。
そして、接続不具合早めに発見できて良かったです(^^)
ロビは、後からサーボを取り替えたりするのが大変そうですよね。
接続不具合もそうだけど、実際に動かしだすと、こけた時などに、
ギアーを壊したり、変な負荷をかけてしまってモーターを焼いちゃったりすると
サーボを変えなくてはいけない時が出てくることを考えると、ゾッとしますよね。
miconoです。
ServoTester for Robi v1.3.1を公開しました。
新しくサーボが届いたので、ポーズ作製ウインドウを
少し更新しました。
[WEBサイトURL]のリンクからどうぞ
みなさん、こんにちは
miconoさん、新バージョン使わせいただいてます
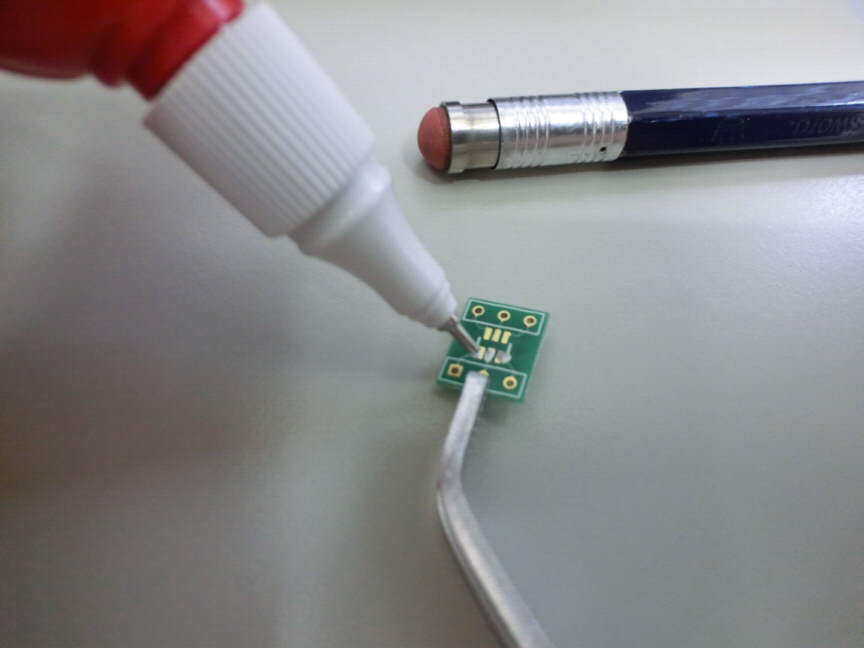
秋月電子通商で「テクノペン」というのがあったので使ってみました
「ペンで線を引く感覚で電気回路ができちゃう」取説にありました
実物は「出の悪い修正ペン」みたいな感じです
写真1:中央はちょっと、左右ははみ出すようにつけ
写真2:固定はされないので、接着剤でしっかり固定(ケーブルはずすときコネクターごと剥がれやすい)
写真3:組み合わせて
「半田付なし」で出来上がり!!
コネクタが小さいのではみ出したり、ずれて横とくっついたりの失敗もしやすいですが、お手軽感があるのではと思います

tom_katさん
miconoです(^^)
「テクノペン」便利そうです。
と、秋月のページで検索したら、結構いいお値段なんですね(^^);;
ところで、コネクターを接着する接着剤どんなのをお使いですか?
液状のだと表に回り込んで、コネクターが付けられなくなりますしね。
ジェル状の瞬間接着剤がいちばんいいかな??
最近は普通のプラスチック用の接着剤を使ってますが、
ケーブルを何回か付けたり取ったりしてると、そのうち外れちゃう
のも出てきて、これまでに何個か壊してます(^^);
miconoさん、こんにちは
「テクノペン」もったいないので今後何かに使わないと(^^;
最初液状の瞬間接着剤を使いましたが、結構はがれやすく、コネクターももろくなり、ケーブルつないだら白いカビみたいのがついたり…
結局ジェル状の普通のボンドを使ってます
あとコネクタのロックかかる部分(接続と反対側のデッパリ)を削って、はずし易くしてます(^^/
miconoさん はじめまして
ServoTester利用させて頂いています。
デイジー接続してしまうとチェックの方法が無い!って事に相当な不安ともどかしさがありましたが、
お陰様で接続(動作)確認ができ、安堵しています。ソフトの公開、本当にありがとうございました。
コネクタの接着が話題になっているようですが、私の方法を以下に
・アルコールでコネクタ裏、基板を拭く
・800~1000番紙やすりでコネクタ裏、基板を軽くやする
・再度アルコールで両方を拭く
・細い粘着テープでコネクタを基板に固定する
・液状瞬間接着剤を爪楊枝に付け、コネクタの両サイドの隙間に流し気味に塗る(ほんの少し)
コネクタの真ん中にまでは滲みませんが大丈夫です。
・瞬間接着剤が乾燥したら、端子を半田付け
この方法で4~5個作りましたが、まだ剥がれたことはありません、ご参考まで
moktさん
うまく動いてよかったです(^^)
コネクターの接着方法。詳しくありがとうございます。
moktさんの方法は手が込んでて丈夫そうですね。
今度試してみたいと思います。
「WEBサイトURL」のリンク先のページに昨日新たにムービーを付けました。
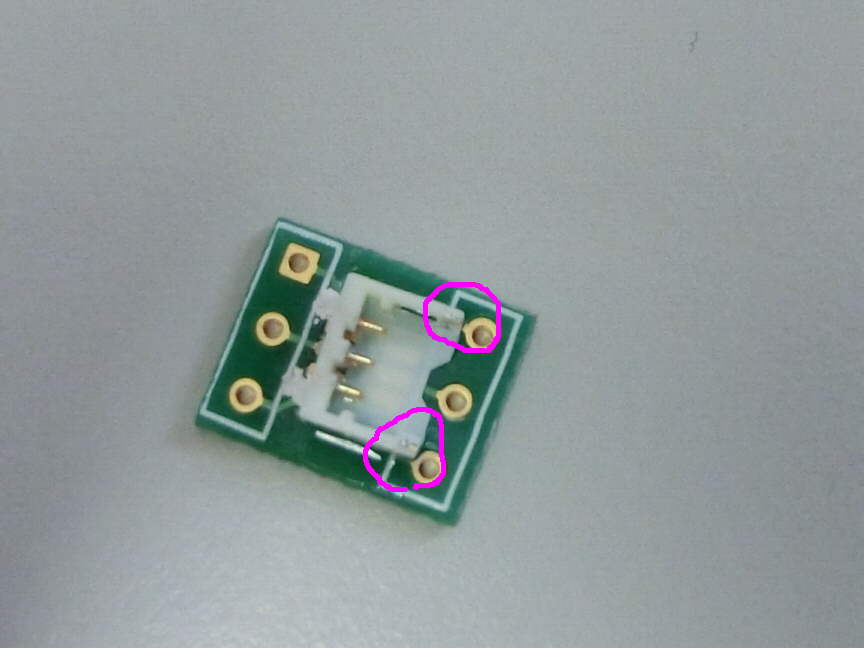
返信No.13 のtom_katさんの写真のピンクの○部分にも金属部分があるので、
そこもハンダ付けする方法でです。この方法で接着剤は使っていません。
まだ、作ったばかりでほとんど試していませんがこれで剥がれなければいいんだけど、
ちょうしにのって10個も作っちゃいました(汗).
miconoさん こんばんは
10個も作成ですか、売る程できましたね b
昨日の接着剤の件、お恥ずかしい限りです。
電子部品ですもんね、ハンダ付けが基本で接着剤とか有り得ませんね。
早速、作成済みのコネクタのハンダ補強と新たに2個作成しました。
壊す気でゴネゴネ、グリグリしてみましたが、相当強いです。
これからは、きっとこの方法がスタンダードになりますね!
有用な情報、ありがとうございました。
動作確認が取れたので、次はミテクレを弄ってみます。
先ずは、ちょっと気に入らない耳のカスタマイズに取り掛かろうかと思ってます。
moktさん
強度チェックありがとうございます。
このハンダだけの方法ではがれにくいとしても、
少しだけでも接着剤を付けておけば安心ですよね。
コネクターは、1回の注文で送料もかかりますからとりあえず40個くらい買いました。
今回は、壊れた時、またハンダ付けするのめんどくさかったのでたくさん作っておきました。
欲しい方がいらっしゃればお譲りしてもいとは思ってますけどね(^^)
ミテクレ。かっこ良くなるといいですね!
私は、そっち方面は全然やったことがないので、
とりあえずは基本純正品のミテクレのままでいこうと思ってます。
miconoさん。
「ふみのへや」さんのブログ経由でサーボテスターの使い勝手を知り、早速miconoさんのブログを参照し、製作を始めました。
皆さんの成功事例を横目で見つつ、小さなパーツに苦しみ、何とかひとつ通電していそうなコネクターが出来たのでサーボテスターを試しました。
IDを設定し、テストボタンを押すと、シリアルアダプターの赤いLEDが点滅するのですが、サーボが稼動しません。
一点教えてください。
FT232RLシリアルアダプターはGND・5V・TXOの部分を使用すればよいですか?
サーボのコネクターですが、コードを下にして「表面」を見た時、左側を「GND」に指せばよいですか?
もう一歩のところまできているように思うのですが、何か注意すべき点があれば教えてください。
P.S.まだ使えていませんが、いつもすばらしいソフトの提供ありがとうございます。
やまちゃんさん
ブログの方にも書きましたが、
FT232RLシリアルアダプターの挿し方は大丈夫だと思います。
「サーボの接続はサーボからのコードを下にして」というのが良くわからないのですが(コネクターは上向き?)、
兎に角、サーボテスターのボードに「s,+,-」と書いてありますが、その順番になります。
miconoさん。
連絡ありがとうございます、ブログのほうに先連絡しました・・・
サーボのコネクターはサーボテストに記載の「S.+.-」と逆にさしていました。
そして、とうとうサーボが動きました。この大感動をどう表現してよいものやら・・・
早速デイジーチェーンで接続した他のサーボの稼動確認をして見ます。ワクワクです。
miconoさん。
ソフトサーボの公開有難うございました。
少し時間が立ちましたが、部品を買い集め、半二重回路まで作りました。
最初、バックナンバーからコネクタ付ケーブルを流用しようとしたのですが、たまたま、買ったのが3号で、3号は基板が付いた号で、この基板のコネクタをそのまま使いました。
早速、テストです。両腕は、うまく動きました。組立途中だった脚は、最初は動かず、途中のコネクタ部の接続が拙かったことがわかりました。
接続後に確認できるこのサーボシステムのおかげで、手戻りなく、作業が行えます。
次に何を公開されるか、楽しみにしています。
nakさん
半二重回路うまく動いたようで良かったです。
いろいろ動かして遊んでみて下さい。
マイコンボードが49号くらいでしたっけね?
マイコンボードがくるとあれこれ動かして遊べるようになりそうですが、
独自でコントロールできるような何かを作るか、49号まで待って、
マイコンボードを動かせるような何かを作るか、迷い中な感じです。
miconoです。
ServoTester for Robi v1.3.3を公開しました。
下肢がほぼ完成したので、その対応と、
ID4と9の最小値最大値に不具合があったため修正しました。
ご興味のある方は、WEBサイトURLからのリンク先から
ゲットして下さい。
miconoさん こんにちわ aichan_kです。
いつもサーボテスターでお世話になっています。
まもなくマイコンボードが配布されますね。マイコンボードには、SDカードが装着
できるようになつておりロビのモーションなどは、SDカードで供給されるようになつて
いるものと思われます。
サーボテスターで編集したロビのモーションをSDカードに取り込み動かすことがてきたら
どんなに良いか、独自のロビが可能となり夢が膨らむ一方です。
勝手なことを言って申し訳ありません。よろしくお願いします。
aichan_kさん
miconoです。
もし、モーション作成用アプリが付属しないのなら、その手もいいですね。
できるかどうかわかりませんが、解析はいちおうトライしてみようかと考えています。
簡単に解析できるといいんですけど、難しいんだろうなぁ~...
miconoです。
このソフトを使って、ちょ~適当にモーションを作ったので、
ぎこちない歩きですが、ロビを歩行させてみました。
左右対称の動きや、交互の動きをさせたい場合、
左右のデータを入れ替えたり、同じにしたりする機能がないと苦労しますね。
あと、簡単にホームポジションに戻れるようなボタンなども必要だね。
次にバージョンアップする時にそういった機能をつけよう(^^)
miconoさん aichan_kです。
お世話になります。
私の場合ですが、サーボテスターのデータをwindowsのメモ帳に読み込み
コピー&ペーストでモーションを作成しています。
マイコンボードを調べたら四つのパケットで制御しているようですね。
マイコンボードとサーボテスターを切り替えて使えるようにする方法を思案中です。
サーボテスターで新しいモーションを作成してSDカードに書き込みロビを動かせたら
なあと思っています。SDカードの内容をパソコンで見ることができるかも・・・・
aichan_kさん
microSDのファイルはbinaryなのはDEVMEMくらいで、あとはアスキーなので、ざっと目を通しました。
STARTUP.XMLで基本姿勢など設定して、tempsdmotionを動かすようになってる感じですね。
STARTUP.XMLで、
例えばID2と書かれてるところの
6つ目が0x0023となってます(=35)。右脚股関節が3.5度(10で割る)が基本姿勢ということですが、これは微調整後の値でしょうから2度が基本姿勢なのかもしれません。他のサーボも兎に角6つ目が基本姿勢の角度ですね(^^) 昨日ServoTester for Robiの1.3.5をアップロードしましたが、基本姿勢の機能をつけました。その基本姿勢はこのSTARTUP.XMLから読み取った値を基準として設定しています。
あとモーションファイルのtempsdmotionは、1番から24番までのサーボの値がず~っとならんでる感じですね。
<wait size="1! adr="0x0b43"/>はBusyの間(モーションが終わるまで)待ちなさいの意味な感じですね。
tempsdmotionに合わせて、ServoTester for Robiのモーションを変換させる機能をもたせることはできなくはなさそうです。
ま、当然でしょうけど、microSDに入っているデータは、RobovieMakerが出力するデータにそっくりですね。
このソフトでRobi用の設定ができるテンプレートがあって、それでモーション作成しているんでしょうね。
miconoさん
丁寧な説明ありがとうございます。
私も勉強しようとmicroSDを購入して、Robi動作テストSDカードの内容をコピー、
これを作業用SDカードとしています。
マイコンボードのスピーカコネクタにミニスピーカを接続したところ各モーションの終わり
頃に「オッケー」と音声が流れます。音質が悪いので、Robiのオリジナル音声をvoiceフォルダ
に保存しtempssdmotion.RM4 SOUND file nameを変更したところ、期待する音質で
Robiの声を聞くことができました。ただし、あまり長い音声だと7~8秒でイニシャライズされて
はじめの声に戻ってしまいます。モーションを長く編集すれば最後まで歌いながら手足を動かす
ことができると思います。
今後ともよろしくお願いします。わからないところがあったら教えてください。
ServoTester for Robi v1.4.0を公開しました
ServoTester for Robiで作ったモーションを
51号のmicroSDに書き出して動かせるようにしました。
「WEBサイトURL」のリンク先を参考にして下さい。
いちおうSDに入ってたファイルをもとに対応させただけなので、
できないことだらけで、
※各トルクオンオフは反映されません
※各ポーズのスピードは反映されません
※各サウンドの再生時間は反映されません
です。
作製したモーションをひたすらループ再生します。
自作したテストモーションファイルの配布も可能っていえば可能です。
いちおう、SDにもともと入ってたファイルは、ちゃんとバックアップとってから使って下さいね。
miconoさん こんにちわ
aichan_kです。
ServoTester for Robi を早速使ってみました。
以前に作ったモーションをパソコンからSDカードにインストールしてRobiに装着し
電源を入れたところ期待通りの動きをしました。特に不具合は、感じません。
このようなソフトを提供していただいたことに感謝します。
Ribiの動作テストアプリを私なりに眺めたところモーション編集ソフトのデータがあちこちに
含まれており、二足歩行ロボットがはじめての私としては、非常に難解となつています。
今回、私の希望に沿った改善をしていただきありがとうございました。
より多くの人達に使ってもらえればいいですね。
miconoさん こんにちは ふみのへやです
「ソフトサーボテスター」の新機能を使用して、自立歩行テストをしてみました。
マイコンボードとバッテリーを搭載して、ケーブル無しで動かしました。
これからも色々と利用させて頂きたいと思います。
宜しくおねがいいたします。
BGMには著作権フリーの「スマートサウンド」を使用しています。
ふみのへやさん
自立歩行テストありがとうございます。
凄いですね(^^)
どなたか挑戦してくれると思ってました!
ホームページをみさせて頂きましたが、
データファイルはダウンロードできるようにはされてないんですね?
「micono」さん こんにちは 「まるかん」と申します。
サーボ通信の半二重回路やら、コネクタの入手をデジキーから、等々しっかり真似させていただいています。やっとお礼書き込みのタイミングが来ました。(笑)
「ふみのへや」さんのホームページに掲載された、モーション・データを書き写して新機能で変換し、自立歩行テストの再現をしてみました。
マイコンボードとバッテリーを動画と同じ様に、両面テープで貼り付け、ケーブル無しでも動かしました。
二足歩行研究の苦労を初期映像で見たことがあります。それが、こんなにも小さいマシンとなって、歩行動作をする様子を見ると、感慨もひとしおです。
これからも利用させて頂きたいと思います。
勝手ですが、機能向上を期待しています。(笑)
宜しくおねがいいたします。

